مولتی ویبراتور
مولتی ویبراتور به مدارهایی گفته می شود که در حالت جابه جایی بین دو حالت می باشد. این حالت ها یا پایدار هستند و یا ناپایدار. در صورتی که پایدار باشد، مدار با رسیدن به آن حالت تمایل به حفظ آن حالت دارد، و اگر ناپایدار باشد، بعد از گذشت زمانی، از آن حالت به حالت بعدی می رود. نوع فیدبک در تمامی مدارات مولتی ویبراتور از نوع فیدبک مثبت می باشد که باعث می شود تغییر از یک حالت به حالت دیگر به طور خود به خود کامل شود. اگر اکنون بخواهم این سخن را توضیح بدهم کاری سخت است.ولی بعد از ادامه سخن خواهید دید که این سخن یعنی چه. شاید شما مداری دیده باشید که می تواند یک ال ای دی را خاموش و روشن کند و به قولی کاری کند که ال ای دی چشمک بزند.یا مداری دیده باشید که چراغی را روشن نگه می دارد تا اینکه یک کلید را بزنید و چراغ خاموش شود ولی بعد از چند ثانیه دوباره چراغ دوباره خودکار روشن می شود. اگر شما دوباره کلید را بنید باز همین روند تکرار می شود و… این موارد تنها چند تا از کاربردهای مولتی ویبراتور ها است.
انواع مولتی ویبراتورها:
1- مولتی ویبراتور آ-استابل
2- مولتی ویبراتور مونواستابل
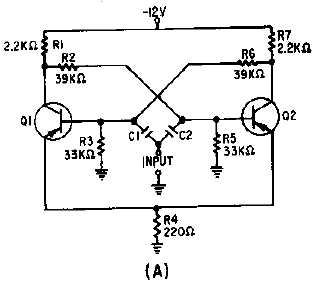
3- مولتی ویبراتور بی(بای)استابل
4- نوع دیگری از مولتی ویبراتورهای بی استابل: اشمیت تریگر